Controller Area Network
Controller Area Network or CAN is a low cost communication system between a network of connected devices. It uses two wires, sometimes called HI and LOW, to transmit data between devices. For FRC, this is most commonly used to connect motor controllers, sensors, and other devices to the roboRIO. Each device on the CAN network has a unique identifier that it is assigned, allowing the roboRIO to communicate with each device on the network individually.
Electronics
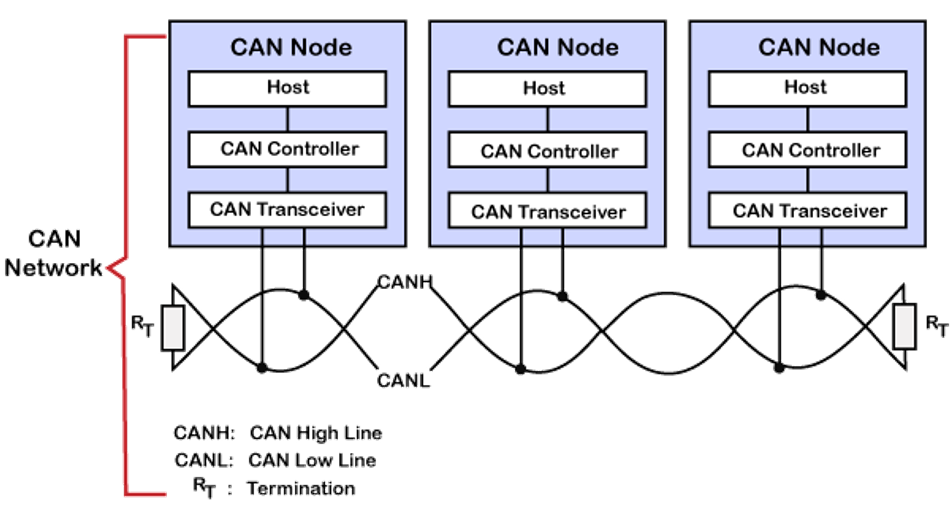
CAN bus uses a differential signaling method to transmit data. This means that the voltage on the two wires is compared to determine the state of the bus. When the voltage on the HI wire is higher than the LOW wire, the bus is considered to be in a logical 1 state. When the voltage on the LOW wire is higher than the HI wire, then the bus is considered to be in a logical zero state. For a CAN bus to function properly, it must be terminated at both ends with a 120 ohm resistor. This prevents signals traveling down the bus from reflecting back and causing problems. Due to the differential signaling method used by CAN, it can also be sensitive to length differences between the two wires. To ensure proper operation, the length difference between the two wires should be kept to a minimum, ideally less than 11 inches. For FRC robots, the wires are typically colored yellow for HI, and green for LOW.
Architectures
CAN uses a bus architecture, meaning that all devices are connected to the same two wires. This allows for easy addition and removal of devices from the network, as well as reducing the amount of wiring needed. A CAN network can be laid out using multiple topologies. The most common topologies are linear, star, and ring.
-
Linear Topology: All devices are connected in a daisy chained fashion to a single bus. The bus will start at the roboRIO, connecting to each successive device on the network. This is the most common topology used in FRC.
-
Star Topology: All devices are connected to a central hub, which is then connected to the roboRIO. This topology is less common in FRC, but can be used in certain situations where redundancy is needed.
NOTE: For star topology to work properly, the number of termination resistors should be kept to a minimum, and bus lengths should be kept as short as possible.

-
Ring Topology: All devices are connected in a circular fashion, with the last device connected back to the first. This topology is not commonly used in FRC, but can be used in certain situations where redundancy is needed.